Software
The software running on our car is Autoware Mini. Autoware Mini is a minimalistic Python-based autonomy software. We developed it in-house, it has a permissive MIT license and is open-source.
Autoware Mini is built on Python and ROS 1 and is therefore easy to start tinkering with. It utilizes Autoware messages to define the interfaces between its modules and is aimed to be compatible with Autoware. Autoware Mini is working on ROS Noetic (available on Ubuntu 20.04 or on other Linux versions, with the help of Conda RoboStack).
Goals
We developed Autoware Mini so that it would be:
- easy to get started with — it has a minimal amount of dependencies
- simple and pedagogical — it utilizes simple Python nodes and ROS 1
- easy to implement machine learning based approaches on — it's written in Python
Autoware Mini is aimed, first and foremost, to be used in teaching and research. While it has not been designed with productization nor commercial use in mind, we are ensured in its capability, as we ourselves deploy it in real traffic.
Architecture
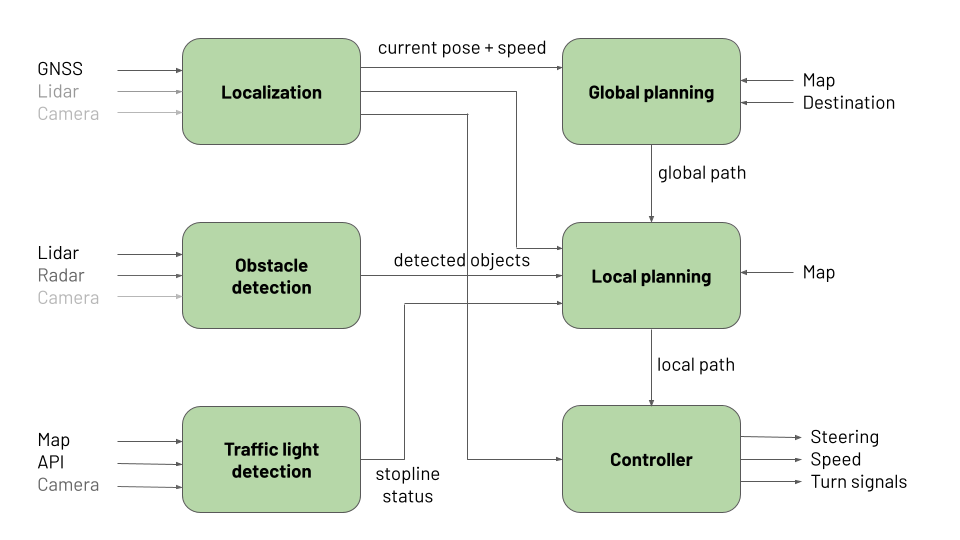
The key modules of Autoware Mini are:
- Localization — determines the vehicle's position and speed. Can be implemented using GNSS, lidar positioning, visual positioning, etc.
- Global planner — when given the current position and destination as input, determines the global path to the destination. Makes use of a Lanelet2 map.
- Obstacle detection — generates detected objects based on the lidar, radar or camera readings. Includes tracking and prediction.
- Traffic light detection — generates a status for stop lines, i.e., whether they are green or red. A red stop line is treated like an obstacle by the local planner.
- Local planner — given the global path and obstacles as input, plans a local path that avoids obstacles and respects traffic lights.
- Follower — follows the local path generated by the local planner, matching target speeds at different points along the trajectory.
Here is an introduction to the features of Autoware Mini. There are more videos in the playlist link below.