The Rally Estonia Challenge
The Rally Estonia Challenge is a neural network training competition organized by the ADL.
The challenge aims to contribute towards making autonomous transportation in rural areas feasible. To simulate such challenges, we have gathered over 500 km of recordings from the WRC Rally Estonia tracks across four different seasons.
The participants train neural networks to drive on the rural Estonian roads. The results are first evaluated in the VISTA simulation and the three best-scoring teams are evaluated with a real car on the actual rally tracks. The team with the least interventions wins.
The Competition of Spring ‘23
For results of Rally Estonia Challenge 2023 see the blog post.
Technical summary
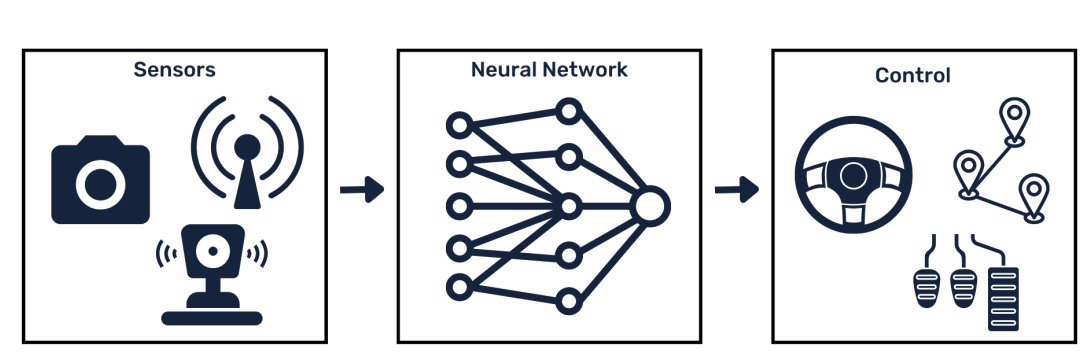
The objective is to create a data-driven autonomous driving system (ADS) that is as safe as possible. Participants will use recordings from approximately 500 km of driving with a Lexus RX450h on rural roads in Southern Estonia. The dataset contains camera images, turn signal states, steering angles and precise GPS locations. The goal is to train a neural network that transforms sensor readings into steering commands.
Timeline
- April 11th — The dataset will be made available
- May 31st — Submission deadline
- June 5–9th — Evaluation of submissions in VISTA simulation
- June 12–15th — Evaluation of top 3 teams in the real world
- June 16th — Announcement of winners, ceremony
Team requirements
A team may have up to three persons and a supervisor. At least half of the members of each team must be students (of any university).
Participation in the competition is one of the possible projects in the following courses for the spring semester of 2023:
- Neural Networks (LTAT.02.001);
- Special Course in Machine Learning (MTAT.03.317).
Participation is not limited to students from these courses; all students are welcome to participate, even if the participation is not related to their studies or coursework. Non-students can also participate as part of a team also containing students. To participate send e-mail to the organizers, see the contact section below.
Prizes & outcomes
The winning team will be awarded 300 euros and three rally passes to the WRC Rally Estonia 2023. The second and third places will be rewarded 150 euros each. The top three teams have the chance to be onboard when their solutions are deployed and drive autonomously in the real world. They will also get ADL t-shirts to remember the occasion.
The topic of the challenge relates closely to the research interests of the ADL. Most innovative solutions may have the potential to be published if developed further in an MSc or Ph.D. thesis or internship. The ADL is willing to host these follow-up projects, offering supervision and further access to the car.
General requirements for solutions
The solutions must be able to autonomously steer the vehicle in all situations where there are no other traffic participants present.
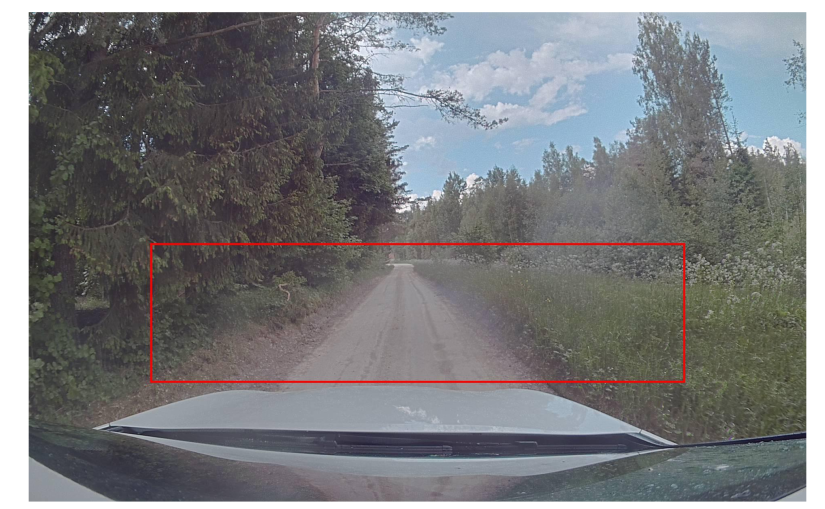
The rural roads used in this competition are mostly gravel roads, with rare sections of paved roads. There is a mixture of two-lane and single-lane roads. On two-lane roads, the solutions must keep to the right lane, as the traffic in Estonia is right-handed. On single-lane roads, the placement on the road does not matter, but safe margins to both road edges must be maintained. In the case of pedestrians or traffic, the safety driver takes control of the vehicle but no penalties are applied.
Importantly, the task is to complete predefined routes in the road network, driving from point A to point B. This means the autonomous system must be capable of not just keeping itself on the road but completing specific desired turns at intersections. The navigation commands suggesting the car to drive straight, turn left or turn right are simulated with blinkers. In the VISTA simulation, the system will set the turn blinker state to either left or right or leave it inactive depending on the desired route. Similarly, during runs with the real car, the safety driver will activate the blinker before reaching the intersection to indicate which way the vehicle must go.
The speed of the vehicle is not controlled by the solutions. In the VISTA simulations, the speed will be set to 100% of the speed used by the human driver in the benchmark recording. During real-world deployments, the speed will be set to 80% of the benchmark speed at any given location (defined by GPS location). Reaching and maintaining this speed will be handled by the car’s proprietary software.
An example of a similar solution was implemented in Romet Aidla’s MSc thesis (video, thesis, GitHub repo) and Mykyta Baliesniy’s MSc thesis (thesis, GitHub repo).
Technical requirements for solutions
The trained networks will be submitted as ONNX-files. The participants must choose one of the three model types supported by VISTA.
| Model Type | Input Shape | Output Shape |
|---|---|---|
| steering | [1, 3, 68, 264] — 264x68 RGB image | [1,1] — steering angle in radians |
| conditional-steering | [1, 3, 68, 264] — 264x68 RGB image | [1,3] — three steering angles in radians: where to turn if conditioned to go straight, left and right |
| conditional-waypoints | [1, 3, 68, 264] — 264x68 RGB image | [1,60] — waypoint coordinates, for each of [left, straight, right], 3 sets of 10 X and Y coordinates |
The dataset is accessible only to the participants of the competition in directory /gpfs/space/projects/rally2023 on HPC rocket cluster. The directory currently contains following two subdirectories:
- rally-estonia-cropped-antialias — the main dataset with pre-cropped front camera images (175GB)
- rally-estonia-full — original dataset with full-size images from all three cameras and lidar
We suggest starting with the first dataset and performing all training on HPC cluster, because the dataset is readily available there. If you want to make use of the second dataset, please consult with organizers first.
During the virtual deployment in the VISTA simulation, computations will be done on a server with NVIDIA RTX 2080Ti GPU at a frame rate of 10Hz, using the ADL VISTA evaluation codebase and ADL version of VISTA. During the final deployment in the real world, computations will be done on the AStuff Spectra computer on the car with NVIDIA RTX 2080Ti GPU.
- The participants can validate their models themselves by testing them against the example Elva track provided as part of VISTA evaluation codebase. Participants are free to set aside some additional recordings from the training set, convert them to VISTA traces using provided scripts and validating their models against those traces as much as they please.
- For the final testing each team can submit up to 5 times + an initial dummy submission to make sure the process is understood. At each submission, the model will be evaluated using held-out traces (not in the training set), repeating the run on each trace 3 times. The sum of interventions over all runs is the main metric. The average whiteness across all time points in all runs is the secondary metric.
- The model names must be in the format [Team_name]_[Submission_Number].onnx (e.g., Eagles_1.onnx). The files should be uploaded via Google form.
- To be eligible for the prizes, the created software must be labeled with a free-to-use license so that the next generation of students can learn from it. The code must be made available to the organizers via a GitHub repository 24h before the main event. The repository could be private at first but made public to claim the prizes.
- If participants want to implement a new model type, they must implement an evaluation for that type in VISTA themselves and organizers will review and accept the pull request.
Evaluation of solutions
The team scoring the least safety-driver interventions will win. In the case of equally good results in terms of intervention count, the model resulting in the lowest whiteness score (c.f. our article1 and article2) will be ranked higher.
The VISTA evaluations are based on recordings of human drivers traversing certain routes. The video frames contained in a recording are used to simulate what the camera would see at different deviations from the human trajectory and different poses the car can take. Whenever the virtual vehicle controlled by the evaluated model goes further than 1m from the trajectory of the human driver, a safety driver intervention is recorded. Consecutively the car is placed back on the human trajectory a bit (1 second) further along the route. Before intersections, the turn signal is activated to inform the model about the desired route (the route human took in the underlying recording). Missing a turn or turning the wrong way results in wandering more than 1m of the human trajectory and is hence penalized by an intervention.
During real-world evaluations, the safety driver is by law responsible for the safety of the test vehicle and other traffic participants. An intervention will be a subjective decision of the safety driver based on the perceived level of danger to the car and others on the road, as well as traffic laws. For example, the model may drive more than one meter from the trajectory that a human would take, but if this is safe and not violating road rules, no intervention may be called. Conversely, an intervention will be called if the model is less than 1m from the human trajectory but too close to the road edge, endangering the car.
In case of an intervention, the safety driver takes control of the car and navigates it back to the center of the lane (center of the road in case of a one-lane road). In the case of on-coming traffic or pedestrians/cyclists on the road, the safety driver takes over, but no intervention is counted as reacting to other traffic participants is not evaluated in this competition.
Changes in rules
The organizers maintain the liberty of making any changes or cancellations to the rules if such a need arises. However, the changes will be justified and explained to the participants.
Contact
Autonomous Driving Lab, Delta building, room 3095
Tambet Matiisen, tambet.matiisen@ut.ee
Ardi Tampuu, ardi.tampuu@ut.ee