Behavior prediction
In order to operate efficiently while ensuring safety, an autonomous vehicle needs to predict the behaviour of other agents in its environment. These agents include human-driven vehicles, pedestrians, bicyclists etc. As humans, while driving, we instinctively predict other road users’ behaviour. But it’s not a trivial task from an autonomous vehicle’s perspective.
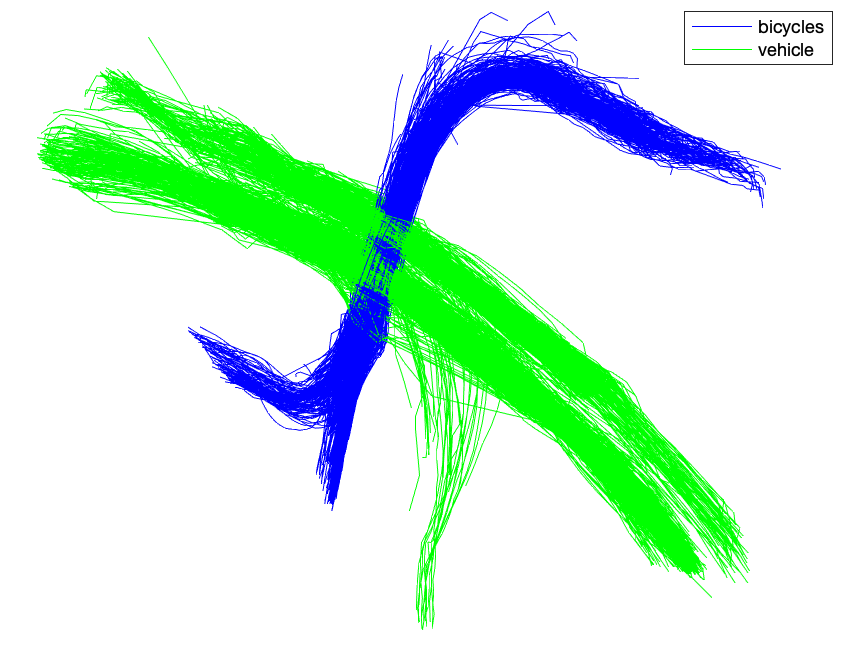
We are investigating methods for behaviour modeling and motion prediction of road agents. We are looking into different aspects of the problem including the agent types of pedestrians, vehicles, bicycles etc., and at many types of traffic scenarios such as roundabouts, junctions, crosswalks etc. We investigate both the use of infrastructural as well as in-situ sensors for the purpose of agent motion prediction. Such techniques are paramount for pushing autonomous vehicles towards level-5 of autonomy, as well as have application for automated vehicles operating at port, warehouses and factory floors etc.
We are also investigating many other aspects of autonomous driving including GNSS-free localization for true level-5 autonomy, and novel perception modalities in autonomous driving such as air flow etc.