Learned driving
Creating modular autonomy software can be complex and prone to failure. An alternative approach, called “learned driving”, aims to simplify the process by using a single neural network instead of a complex stack of modules.
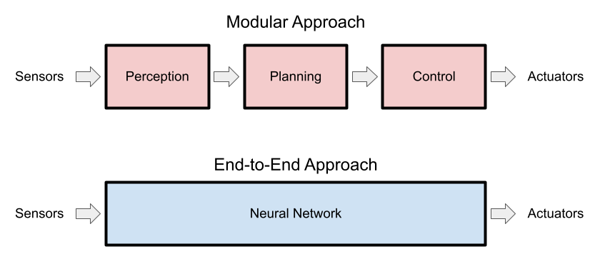
However, this approach also has its drawbacks, as neural networks can be unpredictable and may fail without warning. Our research aims to improve the reliability and robustness of machine learning-based self-driving techniques.
